 |
The pre-prototype of the waterwing did not look anything like its successors. The idea issued from the question to what was the most effective way in which I could deploy the force in my arms in underwater swimming. Because of my specialisation in sculpturing whales and dolphins in wood, I thought that a contribution to the speed I could gather with my monofin would further the empathy in my subject.
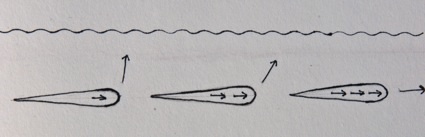
Front crawl was out of the question as was the dolphin stroke, because the recovery stroke evoked so much resistance that the forward effect was largely lost. This goes to a lesser degree for the breast stroke, but this did not combine with the mono as that produces an almost continuous advancement compared to the single strokes of the breast stroke. Therefore I thought myself in an undulating progression. With my arms outstretched and my hands flat and next to each other I hoped to be able to enlarge this plane.
The very first attempt looked like an apron. Out of white, about 2 mil thick, flexible plastic I cut a sheet, in which my thumbs had a grip inside two holes in the front. At the back on both sides I stapled narrow extensions into a loop that fitted my arms up to my elbows. I only tried it out once, in a swimming pool. To my surprise I flew forward at the down stroke, but at the upstroke got 'half a swimming pool' between my arms. It was clear to me I was doing something terribly wrong, but also, that there was a lot to be gained.
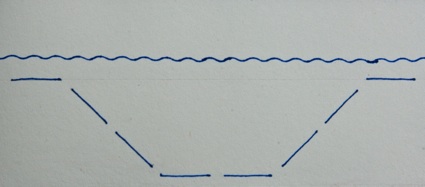
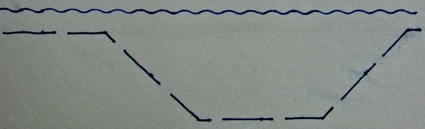
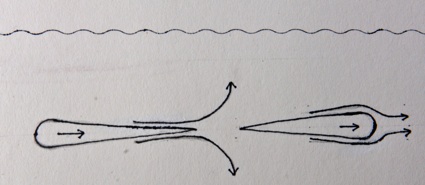
Shortly thereafter I met Herman Sips. He was building a kind of hydrocycle and illustrated the principle by showing me how easy it is to move a slat with a rounded front and a tapering end through water. This principle I applied to a width of wood that I moved through the water in an undulating way.
This I tilted downward and pushed it down with outstretched arms. Thus you push water backwards and go forward yourself. When down, I tilted the plank upward and heaved it, pushing back water as well.
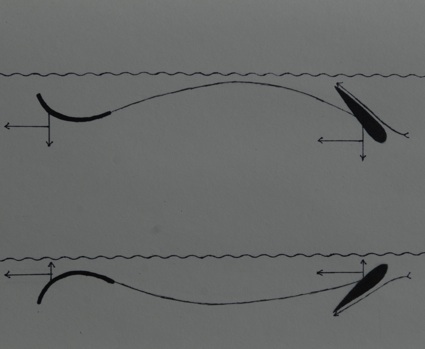
Working with stretched-out arms seems to be a heavy job, especially with your breath held. What actually makes it a lot easier is that at enough speed, preferably attained with a monofin, the tilt results in the oncoming water making the wing glide either up or down. So you can dose the force with which you push down or heave as little or as much as you choose in order to create 'rapport' with the water. This undulating cycle is only not productive at the tilting moment.
From this mode of progression a number of similar models resulted that varied in length, width and specific weight. To prevent confusion: 'length' I measure first and from fore to aft and next 'width' from left to right, so from the swimmer’s perspective. Therefore in this respect the width is greater than the length. Because buoyancy turned out to play a part in underwater swimming, I soon began using species of wood that only just kept floating. Thus I could always find them back at the surface and did not have to waste energy to keep it submerged. Preferably African padouk and zebrano.
From two species that are heavier than water I made one long and narrow model (Surinam green hart)

and one that was rather shorter and wider (lignum vitae).

Their mass felt better. At the down stroke the weight assisted, at the upstroke the oncoming water partly pushed the wing up. This produces a kind of flywheel effect. Soon the sinking, however, proved to be too great a disadvantage.
Other experimental variations were two slats with about 5 cm space in between, of which I expected a turbo-effect, which failed to occur and a slat with at the extremes a vertical winglet as is applied to aeroplanes, idem ditto.
I had bought my monofin from Edwin Kanters, at that time Dutch champion, and asked him to try out the plank. Although he was not in top form at that moment he broke his personal record on the 100 meters. I lent him the plank and asked him to tell me his experience and suggestions. His biggest objection was that in competitions, except for the discipline of compressed air, it was not allowed to hold something in your hands, but my most important one was that he was afraid that at the starting dive the plank would double up and might damage his wrists.
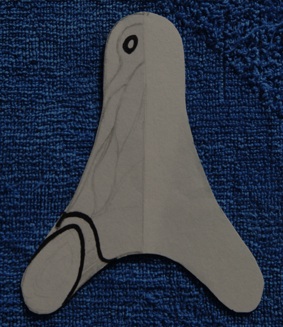
Thereupon I made a plank with an arched leading edge and this marked the birth of the basic shape I have experimented with for 15 years.
Assuming that a larger surface would give more thrust I made them ever bigger. The last of these endeavours was made in zebrano and as a table top could seat up to six people. This one turned out to be hardly manoeuvrable; I nearly had to climb on top of it to get it under water.
Another, mechanical approach was a wing that consisted of a left and right blade, joined by ring screws. The idea was that I could move both sides independent of each other, like a dolphin does with its pectoral fins. This felt as if I had a thrust plane in each hand that needed far too much force to control. Moreover, if I swam with one hand in the middle and the other more out, I could use the leverage principle and that did not work this way.
Another tryout was to vary the thickness of the leading edge. This worked out best at 4 cm. A thicker edge encompasses too much volume to immerse. A thinner one 'catches' too much water and makes steering less easy. Also the 'chord' proved to be of similar defect. At the keel of a sailing boat this runs at about a third of the length from the leading edge. Also with this profile the wing was hard to steer. The best result I had with a leading edge that had half a circle across the thickness, so with the radius of 2 cm.
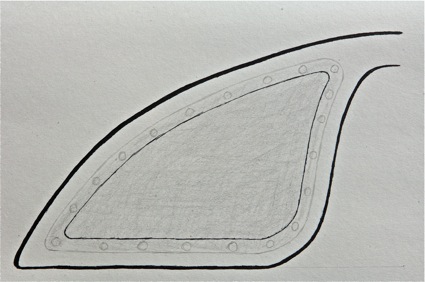
The next step was to investigate if, like a ray, I could push more water backwards with a built-in undulation and could smoothen the tilting gaps. Therefore I cut out so much surface within the blades that the edges, like a strong enough frame, remained.
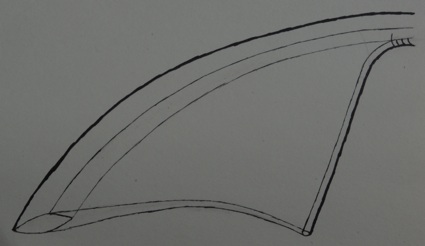
This was an improvement, but I did have the feeling that the trailing edge was still lagging. This I removed, but it rather weakened the inside edge. So at a metalworker’s I ordered a bent pipe that was flattened towards the ends as leading edge. The other, thinner pipe formed the inner edge and was welded to the leading edge at the two centres. The 'legs' of the inner edge were straight, so around it I could fold and fasten a sheet of rubber from and to the leading edge without creases. I closed the ends of the pipes, hoping the trapped air would suffice to keep the ensemble afloat. When finished I could hardly wait to try it out, but there was too much wind to do this safely. After three days I ran out of prudence and jumped with it into the water from a protruding point. The wing turned out to sink, but the mass handled thrivingly. When I wanted to leave the water at the 'Emmenthal rocks' I was washed up and down to such an extent that I had to let go of the wing for preservation and thereby lost it for good.
I then ordered a similar inside edge and assembled this with a spring hinge that straightened the rubber sails again to the leading edge. This worked so well that I swam with it for three years and left further development at ease. With this wing I tilted the leading edge, so a hollow formed by which I scooped and pushed more water away, while at the end of the stroke the spring restored the original, flat shape. The tilts were absorbed by the glide.
For the wings I have made in Ireland since 2004 I have exclusively used marine plywood. Though this is quite buoyant, the final volume was so small that the wing submerged easily. Moreover all the above-mentioned wings have the characteristic that when they are brought into a trajectory, buoyancy reduces in speed.
Last winter, '08/'09, I left the concept of the arched wing. In an article about the propulsion of whales I read about the expedient relation between 'lift' and 'thrust' in the pectoral fins of a humpback whale. On previous occasions I had read about the fortuitous water passage of the sphere-shaped sub-bow of larger ships.
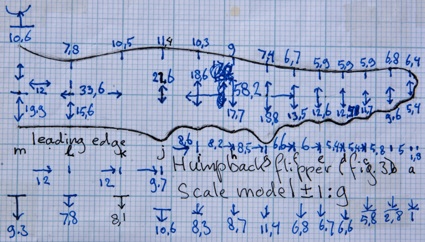
In my new add-on tent I started making a true, made-to-human-measure copy of the pectoral fins of a humpback whale, fashioned together in a waterwing.
Compared with previous wings, this had a much larger volume and therefore more buoyancy. After various experiments it became clear that the quantity of lead, needed to just keep the wing buoyant, should be positioned in the middle. There it gives the best balance, making the wing most manoeuvrable, while the least mass has to be moved, cf. weighted extremities.
The surface of the 'Hump' is smaller than that of the 'Arch', but the thrust, and thereby the lift, is considerably larger as the hydrodynamics are better and the 'drag' is smaller. At reversing the Arch water was caught by the parting rubber sheets, to no distinct avail. With the Hump this gives a scala of new manoeuvres. Although it easily 'catches' into its
own course, in a light curve it is well-manoeuvrable and especially effective in recovery strokes and positioning manoeuvres. The latter often occurs when I want to shift the wing and the resistance of its surface hinders this.
As the blades follow in line, leverage, i.e. with one hand in the middle and the other towards the extremity, is much more forceful. Thus I can spin round my axis very fast. In this I hold the monofin perpendicular to my axis so as to nearly annihilate its resistance. As Dusty has a strong tendency to approach from the rear I can 'intercept' her faster. Moreover, the bumps on the leading edge provide extra grip.
Though the wing floats in water, on land it is rather heavy. That can only be diminished if I lessen the volume. Then it will also need less lead. Nothing can be removed from the thickness of the leading edge because of the 'catching'. Basically this also goes for the tapering, but the course of the width of the present wing, so from the middle towards the extremities, could be more gradual.
This winter I hope to have the opportunity to work in glass fibre and epoxy. I want to cast a wing that is perfected in width and with the mould make a hollow humpback wing. I'll load it with lead from the middle on to keep the centre of gravity in the handle.
As a future phase I am considering flexible leading edges; in width they may profit from elastic whiplash, in length they could shorten the wings at a higher velocity. Sounds like cross-breeding a dolphin, a ray and a gurnard, moving on a fin and a prayer.
Jan Ploeg, Fanore, Co. Clare, Ireland, September 8 2009
 |
|
- Swimming on the surface. The least efficient way of progress in water, because a lot of energy is wasted on the causing of waves.
- Pushing up. 'Spyhopping' for dolphins. This way you can have a look around above the water. For instance if you can see diver's air bubbles emerging, to go and pay a visit.
- Fast dive, shallow. Make speed and steer the wing down.
- Fast dive, deep. From stationary push the wing until vertical under you, hook your body, preferably pushing your behind above the water. Consequently you heave the wing and steer it downwards. (By going down like this and up as described in fig. 9, you can converse a lot of 'travel time' into bottom time.)
- Full water swimming, that is underwater. Most swimming strokes, with the exception of breaststroke, are only suitable for the surface.
- 'Wing In Ground' (WIG) is an aero plane expression. It refers to flying at minimal altitude, so a pressure bed is originated between the plane and the ground. Something similar happens when you glide closely over the bottom and therefore you swim lighter and faster.
- Wingonly. To save vulnerable environment I swim with only deep wing movement.
- Turning, on the surface, as well as beneath. The WaterWing is placed vertically and across the direction of swimming. The water resistance is thereby maximized. You pull yourself along, keeping it as stable as possible, until you are at the other side. During this operation you hold the monofin in such a way (mostly horizontal) that is has the least resistance.
- Emerging stroke. Pull the wing from outstretched above your head, forcefully down. When under immediately restore streamline. Repeat if necessary.
- Improvise. For searching or orientation on moving targets like fish or dolphins I can only recommend good sense and wish you lots of fun.

Webdesign: De Poel Webdesign